
汽车科技热门
 ADS算法的技术演进与挑战
ADS算法的技术演进与挑战
 汽象观察23期:深圳允许上路,无人驾驶能否“加速驶来”
汽象观察23期:深圳允许上路,无人驾驶能否“加速驶来”
 腾讯X奔驰,自动驾驶发车
腾讯X奔驰,自动驾驶发车
 敢为人先的深圳再次从零到一,自动驾驶汽车全面上路已近在眼前
敢为人先的深圳再次从零到一,自动驾驶汽车全面上路已近在眼前
 Robotaxi 吗
Robotaxi 吗
 NOA 量产时代真来了
NOA 量产时代真来了
 自动驾驶的必经之路
自动驾驶的必经之路

推荐资讯
让区块链变成人人可用的工具,上海原创Web3.0操作系统是如何诞生的
隐私之变|自我主张时代变革,从构建WEB3.0的ID体系开始
被投资圈盯上,风头超过元宇宙,Web3.0到底是啥?
Web3.0,勾勒下一代互联网模样
为什么说中国汽车产业已经真正“支棱”起来了
我在新能源汽车行业打工10年:从月薪2千涨至年薪40万,终于熬出头
对话梅宏院士:数字化转型不是想不想,而是必须转
 王兴继续“电商零售梦”:告别社区团购 美团优选变身明日达超市
王兴继续“电商零售梦”:告别社区团购 美团优选变身明日达超市

ADS算法的技术演进与挑战
 财经快报
|
2022/08/19 12:53:24
财经快报
|
2022/08/19 12:53:24
作者 :Dr. Luo,东南大学工学博士,英国布里斯托大学博士后,是复睿微电子英国研发中心GRUK首席AI科学家,常驻英国剑桥。Dr. Luo长期从事科学研究和机器视觉先进产品开发,曾在某500强ICT企业担任机器视觉首席科学家。
中国古人追求的梦想是“拓地三千里,往返速若飞”,现代人类衣食住行的理想境界,也无非是“健康、快乐、富足、平安”。然而,从联合国的统计数据可以看到,全球每年道路交通事故受伤者约5000万人,死亡人数125万,经济损失高达1.85万亿美元左右,而94%交通事故均来自可以避免的人为因素,且90%发生在中低收入的国家。
研究表明,将有效预警提前1.9秒,事故率可下降90%,而提前2.7秒,事故率可下降95%,所以AI算法的感知认知领域的技术进展推动了辅助ADAS以及自动驾驶ADS技术的行业落地也是势所必然。2021年统计数据表明,一个美国司机在自然驾驶环境NDE下每英里的车祸发生平均概率约在百万分之一的水平。
而2021年美国加州自动驾驶车辆AVs最好的disengagement rate也只能做到十万分之一,这一定程度表明AVs的安全性能估计比人类明显要差一个数量级,虽然可以适应仿真和简单的不密集的约束真实场景,但仍难以应对城市的复杂道路交通场景。场景适应能力问题,以及最核心的安全差异问题也就是所谓“Long-Tail Challenge长尾挑战”,依旧是ADS当前亟待解决的最大难题之一。
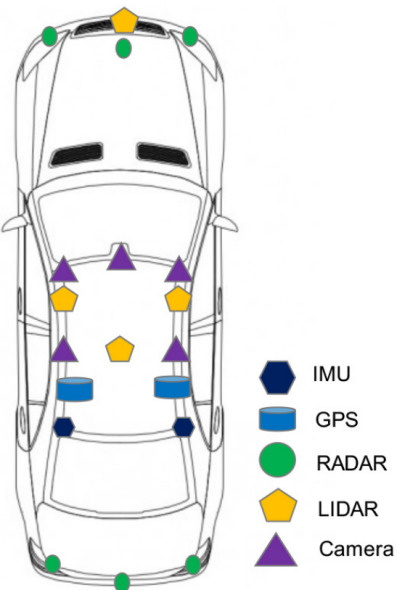
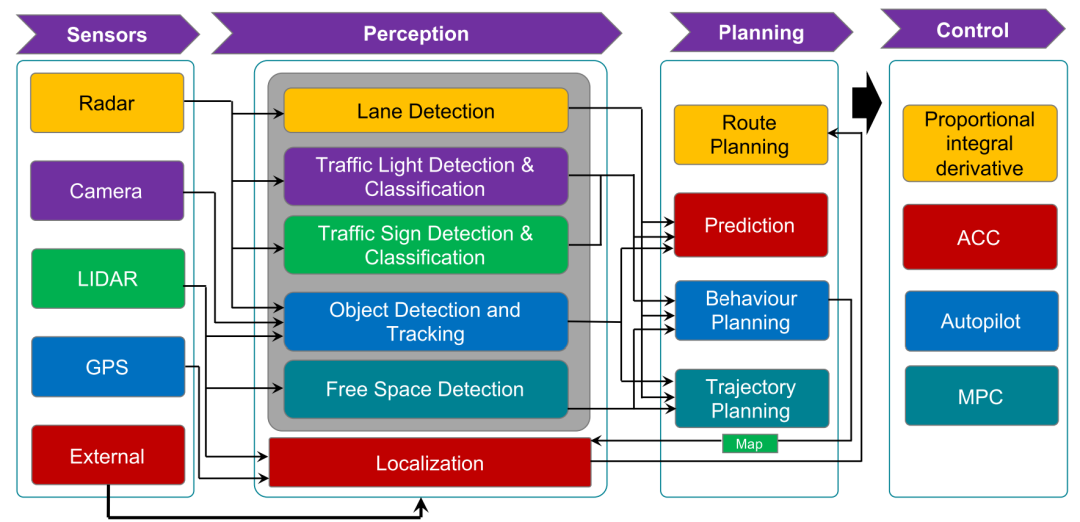
图1. ADSv2.0典型系统分层架构 (Khan, 2022)
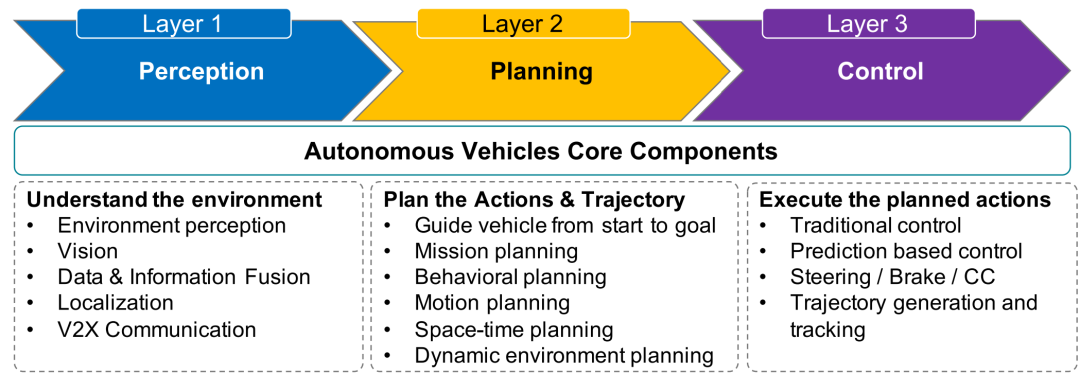
图2. ADS分层核心部件 (Khan, 2022)
ADS算法的典型系统分层架构如图1和图2所示,目前已经从多模数据结构化+决策层后融合ADSv1.0演进到了一个全新的多模感知与融合推理的特征级前融合ADSv2.0阶段。如上文所述,ADS面临的挑战具体体现在:
能够在统一空间支持多模传感器感知融合与多任务共享,在提升有限算力的计算效率的同时,确保算法模型在信息提取中对极端恶劣场景(雨雪雾、低照度、高度遮挡、传感器部分失效、主动或被动场景攻击等)的泛化感知能力,降低对标注数据和高清地图的过度依赖;
预测与规划联合建模,离线与在线学习相结合,监督与自监督学习相结合,从而能够处理不确定性下的安全行驶与有效决策,提供认知决策行为的可解释问题,通过持续学习解决新场景问题。
ADS场景适应能力的挑战
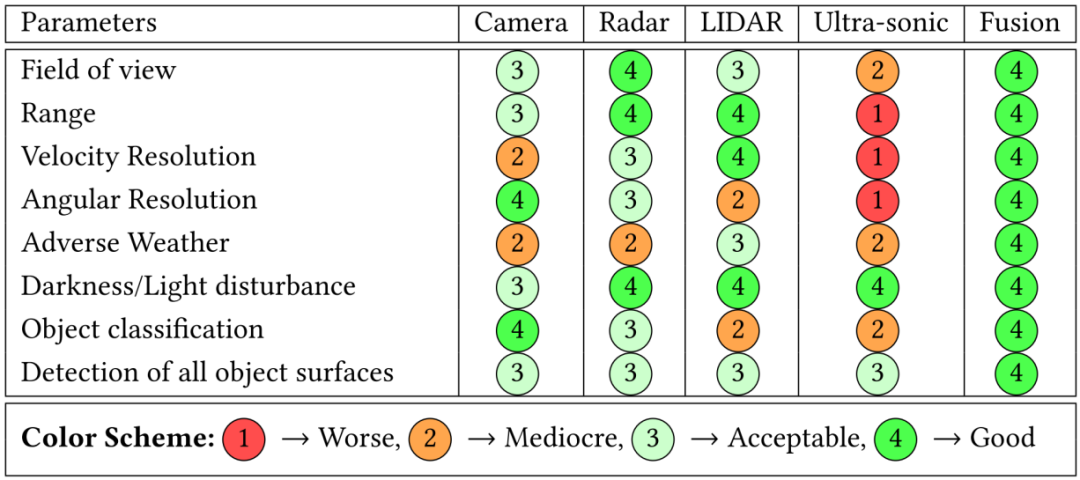
图3. ADS场景适应能力问题 (Khan, 2022)
如图3所示,ADS部署的传感器在 极端恶劣场景(雨雪雾、低照度、高度遮挡、传感器部分失效、主动或被动场景攻击等)的影响程度是不一样的。所以传感器组合应用可以来解决单传感器的感知能力不足问题,常用的几种组合是:
➤ Camera+LiDAR;
➤ Radar(3D,4D)+Camera+LiDAR(LD,HD);
➤ Radar+Camera。
统计数据表明Radar+Camera是最常见组合。ADS传感器特性总结:如下:
Camera :可以提供360环视和远距前后视角的环境语 义 表征,但需要一个照明环境,单目和多目摄像头可以提供一定程度的目标深度信息;受恶劣场景影响严重;镜头脏污会严重影响图像质量。
LiDAR : 可以提供场景的空间信息;但难以检测有反光效应的或透明的物体;当雨速高于40mm/hr到95mm/hr,信号反射密度严重损失并产生雨枕现象;大雪天气下可视距离缩短并产生反射干扰波形;浓雾场景会产生鬼影现象;温差会产生额外时间延迟。
Radar :对周围车辆检测准确率高,可以提供目标的速度信息,4D Radar还 可以提供目标高度的可靠信息; 不适合做小目标检测;大雨、浓雾和暴风雪会产生接收信号强衰减和斑点噪声,总体对环境的适应性高。
AVs使用体验数据显示,在暴风雨雪天气,车辆的控制由于打滑和oversteering等原因,目前是远低于用户期望的。
ADS长尾问题的挑战
“长尾问题”没有一个很明确的定义,一般指AVs即使经历了交通公路百万公里数的路况测试,对每个AI算法模块而言,包括感知层和决策层(预测+规划),仍不能完全覆盖各种各样的低概率安全至关重要的复合驾驶场景,即所谓的“Curse of Rarity (CoR)稀缺问题”。如何定义和分析这些稀有场景,可以有助于更好理解算法性能的提升,从而加速安全可靠的ADS解决方案的开发与部署。
对于大部分视觉任务而言,问题复杂度增加,对应维度也在增加,意味着数据在特征空间更加稀疏,为了一个可靠的结果,数据需求会随维度增加而指数增长,而性能只可能线性增长,R. Bellman统一定义这类问题为“Curse of Dimensionality(CoD)高维问题”。ADS领域的CoD高维问题显然来自上述所提的各类天气状况,道路基建,人车混杂,城市乡村各类路况,道路设施(高速、路口、转盘、隧道、高架桥),人车交互,车车交互等。针对CoD问题,深度学习DL算法在ADS领域确实带来了很多长足的进展,包括
多模感知 :主要是针对Camera/LiDAR/Radar海量数据流进行特征提取,DL网络主流趋势是卷积CNN或者贝叶斯NN+Transformer的组合架构,在统一的特征空间实现多模感知,特征融合共享以及多任务来提升算力的整体效率与安全可靠的环境感知能力。
融合推理 :主要是基于模型与基于数据的双学习模式,DL网络主流趋势是基于目标交互GNN或基于统计模型的贝叶斯RL学习或On-Policy应急学习,实现ADS安全可信的预测规划类决策与控制。
对于上述 CoD高维问题的解决,可以简单分成两种应用方式:
感知层的特征高维提取和降维融合重建 :DNN网络多采用梯度下降Gradient Descent(GD)来做网络参数调优,对应的视觉任务包括3D目标检测跟踪、交通路标检测分类、场景与可驾驶区域分割、分道线检测或分割等,AI模型多采用CNN、Transformer、Bayesian NN、RNN、GNN等;
决策层的策略(decision-making policy)学习 :DNN多采用Policy Gradient (PG)理论、Bootstrapping、Monte Carlo Tree Search来做优化策略,将高维变量空间转换到NN的参数空间,对应的视觉任务包括目标行为建模与运动轨迹预测、运动规划与定位控制等。AI模型多采用Deep Reinforcement Learning (DRL),Graph Convolution Network (GCN), Transformer, 结合贝叶斯学习、模仿学习Imitation Learning (IL)、Inverse RL、Off-Policy和On-Policy应急学习等;
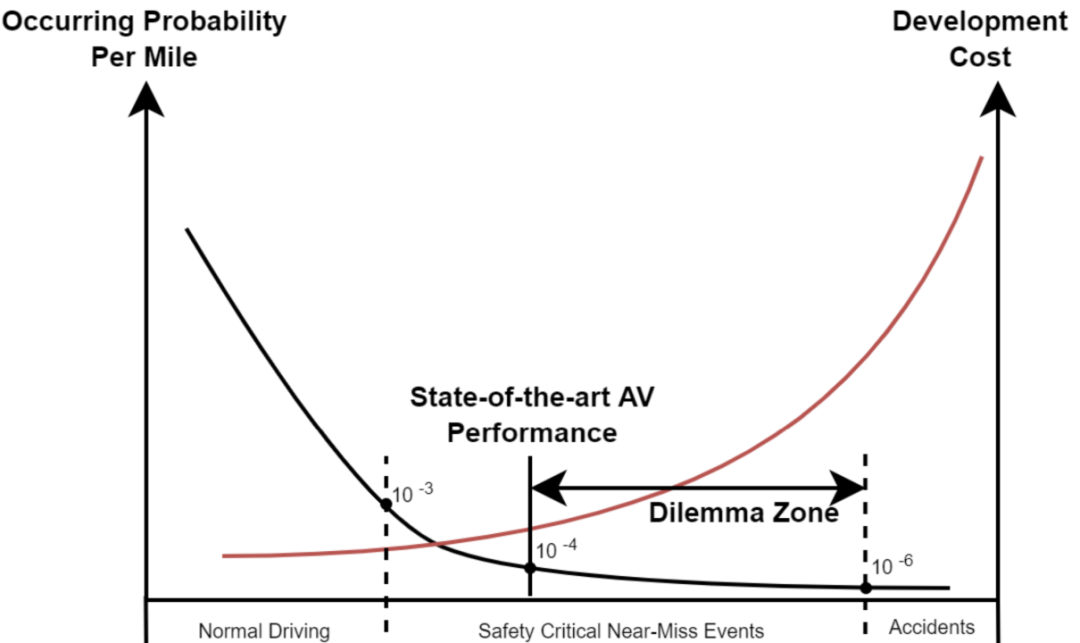
图4. ADS中CoR问题的呈现图 (Khan, 2022)
如图4所示,上述几类方法可以部分解决 CoR稀缺问题,但在机器人、ADS领域的一个关键挑战是系统安全性能的保证。一个解决的思路是采用仿真来产生上述所提的大量稀少的安全事件场景,但仍然远远不够,原因在于多数仿真环境采用手工设计的规则很难模仿现实驾驶场景的高复杂性与不确定性,安全相关的真实事件数据非常难以采集,实际路况中人车交互和车车交互也很难建模,安全度量和评估也同样异常艰难。从AI算法角度,可以在仿真数据基础上继续结合importance Sampling和importance Splitting方法,importance Sampling方法可以根据输入的概率分布来对输出的Likelihood Ratio释然比进行加权来产生无偏置的估计,这只适合简单的场景。importance Splitting方法强激励的通道可以继续分解,可以将稀有事件的估计分解成条件概率分布序列从而减少估计方差,但人工设置的阈值选取是一个挑战,也很难评估Policy空间的性能敏感性,尤其是针对near-miss事件和交通事故等各类不确定性。
ADS-RL安全学习的挑战
对于ADS的决策层算法而言,最早采用的基于手工设计的规则的方法,应用场景受限难以应对现实驾驶场景的高复杂性与不确定性,其典型案例是开源自动驾驶系统Autoware和仿真平台CARMA,采用有限状态机来产生车辆轨迹,为了确保AVs行驶安全,在高复杂度交互场景会产生车辆减速或停车现象即所谓的”Freezing Robot”问题。工业界采用的基于数据的监督学习的方法,仍然难以解决CoR和CoD中数据总量和数据不平衡的问题,现有的真实驾驶里程标注数据总量,估计只有期望数据量的1%以下。
第三类最有希望的DRL方法是一种模仿动物学习行为的 自学习方法,通过状态State不断地与环境的行为交互Action带来的奖励Reward积累来寻求最优策略Policy,最大化未来累计奖励的一个随机过程,来应对不确定性。按照最优策略的获得方式,可以将RL分成间接式Indirect RL和直接式Direct RL两种:
Indirect RL: 可以分成Policy Iteration和Value Iteration两种,其基本原理是通过求解问题的最优性条件得到最优策略,针对连续时间问题,多采用哈密顿-雅可比-贝尔曼方程(HJB equation)求解;针对离散时间问题,采用贝尔曼方程(Bellman equation)求解
➤算法案例:Deep Q-Learning, DQN, D3QN, A3C, GAE, DDQN
Direct RL: 其最优策略是寻找最大化目标函数的参数化策略,将最优控制问题看成一个优化问题,采用数值优化方法进行求解,可以采用一阶优化方法,即策略梯度Policy Gradient法,它沿着目标函数上升的梯度方向,不断地更新策略参数,直到找到最优解,最新的策略多采用将ADS行驶安全也做为一个约束项
➤算法案例:TRPO,PPO, DPG, DDPG
DRL采用的Policy Gradient方法,其目标函数可以表示为:

其中?为神经网络参数, ?(?) 为目标函数, ?? and ??为state和action,策略policy ?,以及q?(??, ??)表示state-action值。Policy Gradient方法中最重要的一个步骤是计算目标函数的梯度值,可以采用Monte Carlo方法来计算。值得一提的是,上述A3C(Actor Critic)是DRL的一个案例,实际上它既可以从间接方法推导得到(Critic是一步策略评价,Actor是一步策略更新),也可以从直接方法推导得到(Actor本身是Policy Gradient的估计过程,而Critic则是该梯度内部的一项,即Value函数 的估计)。DQN方法不同与上述参数化Policy直接进行学习模式,其目标是通过对action值进行学习,通过基于预估值来选取,主要步骤是更新能够预估 action值的NN参数。显而易见,稀有事件问题仍难以解决。
采用DRL学习的方法,由于CoR和CoD问题,同样存在稀疏奖励Reward问题和Policy Gradient估计的方差过大等瓶颈问题。
在数据比较充分的情况下,深度模仿学习Deep IL通过行为克隆、直接策略学习、和Inverse IL来模仿人类的驾驶行为,这种监督模式的知识学习方式对大多数场景是比较有效的,而且学习效率高于DRL, 但同时缺陷也非常明显,其一是模仿学习永远难以超越人类的驾驶水平,其二是涉及交通安全的场景,CoR问题依旧存在,存在数据集偏置不平衡和实验与真实场景不匹配“Covariate Shift”的问题。现在一种比较通用的方法是把Deep IL与DRL相结合来提升学习效率。这里值得一提的是将图神经网络Graph attention-based Network (GAT)与DRL结合,利用自关注GAT来对异构交通信息(路面结构和车辆状态)进行编码和对车辆 交互进行隐形建模,DRL的策略网络综合了基于像素的和基于状态的知识信息来无监督训练AVs来适应动态变化的城市交通场景,减少了对标注数据的依赖。
Deep Safe-RL的挑战
Deep Safe RL作为DRL的一种,通过一些先验假定(例如受限扰动集)与安全约束,来提升安全性能保证。Safe-RL通常可以建模成受限的马尔可夫决策过程CMDP,对应的可行策略集需要满足安全约束边界,优化目标是在累计约束下提供最大奖励性能和用最小的代价来满足安全。太约束的先验假定会导致部署时决策过于保守,反之则容易导致车祸发生,而且这些先验约束会与场景相关,仍难以应对不确定性的超级复杂场景,尤其是CoR和CoD问题的组合场景。目前对safe multi-agent RL的研究也处在刚起步阶段。
Safety Under Uncertainty:对ADS决策来说,知道我们什么时段不知道什么非常重要,同时我们也需要识别决策是否是确定可行的,一种常用的做法是对不同的路径规划提供安全性的概率估计来帮助决策。决策的确定性分析与可解释性,也有助于开发与验证工作。
CoR稀缺问题的挑战
涉及交通安全的事件场景数据是非常稀缺的。假定上亿英里里程数可能碰到一次AVs的致命事件,需要上万亿英里的里程数估计才能积累足够的数据。从工程实践来看是非常不现实的,虽然2022年已有几个国家先后开通了ADS L4车辆上路的法规,但这个僵局严重影响了AVs安全性能的提升和部署进程。一个可行的方案是通过收集人驾驶的车辆数据,例如美国交通部的统计,每年全美有3万亿英里的里程数累计,其中包括6百万次车祸,2百万人受伤,3万人致命伤亡事件。避开数据采集的隐私问题不谈,这类自然驾驶环境(NDE)海量车辆轨迹数据,可以有助于建立高保真NDE模型,从而通过仿真环境来构建大量合成数据,这样的思路在过去对其它行业感知类视觉任务已经证明是非常行之有效的。
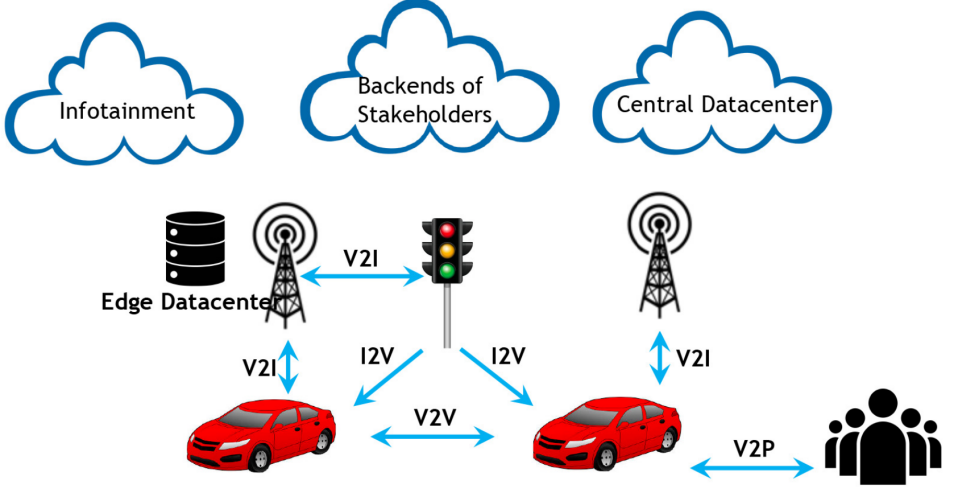
图5. ADS协同CAV的呈现图 (Khan, 2022)
业界第二种思路是将这类涉及交通安全事件的发生概率降低到人类可以接受或者可以忽略的水平。如图5所示,解决问题的途径包括协同CAV技术,即通过对道路基础设施部署大量的多模传感设备(Camera、LiDAR、Radar),通过V2V,V2I(例如路边边缘计算设备RSD)和V2X通信技术来提供车车或者车路协同来实现知识与信息共享,有效解决单辆自动驾驶汽车由于遮挡和有限视野问题产生的难决策的僵局。相对而言,单AV的多摄像头、多模融合感知多任务共享,以及CAV(V2V,V2I)之间跨摄像头、跨模感知融合技术目前已经有非常明显的进展。
小样本数据问题,一直是业界的一个大难题。零样本或者小样本学习,持续学习或者终身学习,也一直是学术界的研究重点,从人类常识角度来说,也是可行的。人类的推理学习模式是两种的融合:从底往上推理(感知数据驱动建模)+由上往下推理(知识学习与认知期待驱动推理)。ADS在知识推理层面演进也应该能够解决CoR和CoD的综合难题。DL算法演进能够有效解决CoD问题,稀有事件的仿真也许可以有效解决CoR问题,通过有限数据与数学物理模型的组合应用在液体动态力学有了一些长足进展,期待类似思路能够应用到ADS领域。
参考文献:
【1】M. Khan, and etc., “Level-5 Autonomous driving - are we there yet?”, https://www.researchgate.net/publication/358040996
【2】H. Liu, and S. Feng,“ Curse of rarity for autonomous vehicles ”, https://arxiv.org/ftp/arxiv/papers/2207/2207.02749.pdf
复睿微电子 : 复睿微电子是世界500强企业复星集团出资设立的高新技术企业。复睿微电子根植于创新驱动的文化,通过技术创新改变人们的生活、工作、学习和娱乐方式。公司成立于2022年1月,目标成为世界领先的智能出行时代的大算力方案提供商,致力于为汽车电子、人工智能、通用计算等领域提供以高性能芯片为基础的解决方案。目前主要从事汽车智能座舱、ADS/ADAS芯片研发,以领先的芯片设计能力和人工智能算法,通过底层技术赋能,推动汽车产业的创新发展,提升人们的出行体验。在智能出⾏的时代,芯⽚是汽⻋的⼤脑。复星智能出⾏集团已经构建了完善的智能出⾏⽣态,复睿微是整个⽣态的通⽤⼤算⼒和⼈⼯智能⼤算⼒的基础平台。复睿微电子以提升客户体验为使命,在后摩尔定律时代持续通过先进封装、先进制程和解决⽅案提升算⼒,与合作伙伴共同⾯对汽⻋智能化的新时代。
更多相关内容
-
泰首智能又又又上电视啦~这次还是央视!!!
2019年新冠疫情爆发,到现在战役已有三年,从最初的人防到如今的技防,可以说防疫战也是科技战。科技助...
-
奥比中光、小度科技等独角兽“神仙打架”,天花板级别的“实力较量”都在这份榜单里!
“独角兽” 话题的温度向来“居高不下”,那么到底何为独角兽? “独角兽”是投资界对于估值超10亿...
-
强化产业链抗风险能力
由国家发展改革委、科学技术部、工业和信息化部与黑龙江省人民政府共同主办的2022世界5G大会将于8月10日...
-
5G+工业互联网的思考与实践
导读: 虽然当前5G+工业互联网仍存在一些问题和挑战,但是5G技术本身也在不断地发展和完善中。5G+工...
-
走进艺赛旗 | 浦发银行长宁支行领导莅临指导
7月12日下午,浦发银行长宁支行申健行长一行莅临艺赛旗参观指导,艺赛旗创始人兼CEO唐琦松及公司其他管...
-
南京市发布应用场景行动方案,天津滨海高新区首发信创产业场景清单——新经济场景动态周刊(0707-0713)
作者:刘湘天、迪丽胡玛尔。 (20
-
到杭州触摸新经济
2022年6月19日到20日,我在杭州与蚂蚁科技集团、阿里云、涂鸦智能等新经济企业进行了交流。期间,我感受...
-
| 揭秘阿里云 ALB Ingress 云原生网关
来源于:洛神云网络 ALB Ingress 是阿里云官方推出的云原生 Ingress 网关,基于洛神云网络平台,具备超...
-
2022年,B端设计的趋势有哪些
本文授权转载自:CE青年Youthce 前言: 在2020年,疫情最为严峻的时候,B端这一领域得到了前所未有的关...
-
新一代HTAP数据库崛起,MySQL生态的最佳归宿
俗话说,天下大势,合久必分、分久必合。数据库领域同样如此。过去五十余年,数据库经历OLTP和OLAP两种...





推荐阅读








